
 产品:64
产品:64
 联系我们
联系我们

获取库卡机器人DH参数有3种方法(作者所知道的):
1、在Solidworks软件里加载库卡机器人模型,生成URDF文件;
2、在机器人系统里找到相应的参数,在老版本里还是可以找到其踪迹,但是新版本都隐藏了。可以依据该变量去找寻(Workvisual项目或者机器人控制器):

3、依据机器人工作空间图,自己建立坐标系变换获取DH参数表:
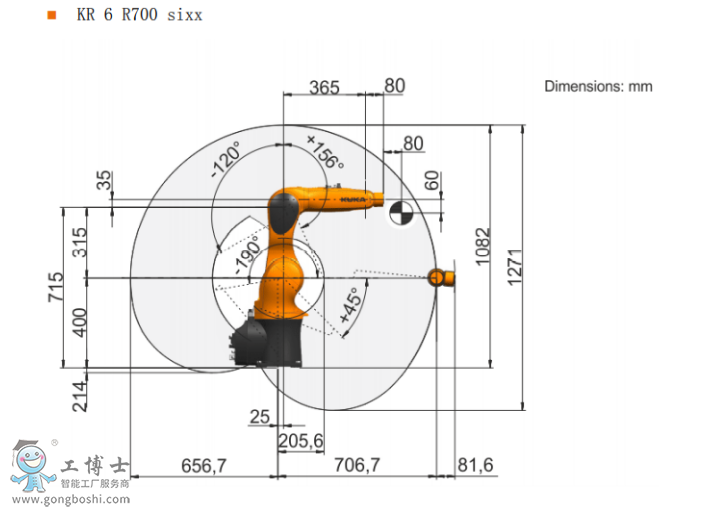
二、一些库卡机器人机型DH参数:
1、KR6 R700机型:
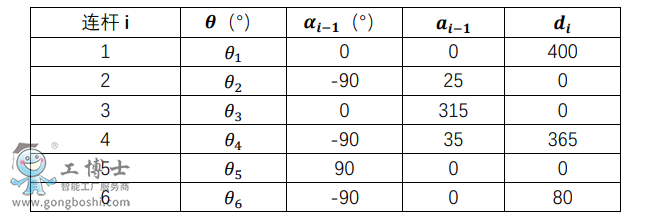
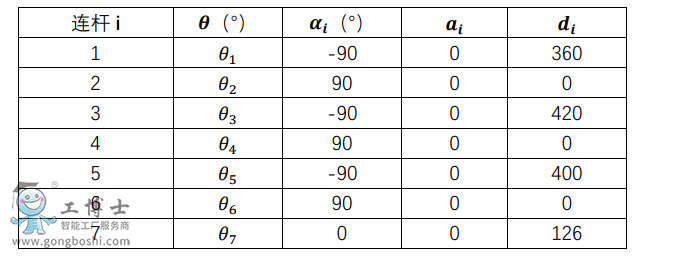
注意:DH参数会随着建立的坐标系不同而有所不同,具体可以通过正运动学来验证。
- 下一篇:KUKA机器人调整示教器灵敏度
- 上一篇:机器人焊接编程入门教程——库卡机器人